
Estimation and Control of swarm of robots in an abstract space
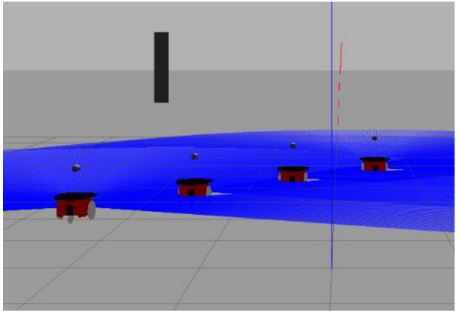 | Implemented obstacle avoidance along with a simple formation using a simple control law to depict swarm behavior of robots using ROS Melodic and Gazebo(3D Open Source Simulator). Report code video |
|---|
Swarm robotics is a new approach to the coordination of multi-robot systems which consist of large numbers of relatively simple robots which takes its inspiration from social insects. The most remarkable characteristic of swarm robots are the ability to work cooperatively to achieve a common goal. The initial section introduces the concept of swarm intelligence and the special features of swarm as well as the comparison between a single robot and a system consisting of multi-robots is brought out. The main section describes the hardware part consisting of components used, building the bots and testing the code and debugging, and the software part which comprises the algorithms developed to bring about swarm nature,obstacle avoidance by robots, master-slave communication and simulations run in softwares such as ROS, gazebo.